SafeTTy Solutions™ packages
![]()
Our SafeTTy Solutions™ packages are designed to help your software development team produce embedded systems that are reliable, secure and safe, in compliance (where required) with one or more international safety standards: IEC 61508, ISO 26262, DO-178C, IEC 62304, IEC 60730 …
Based on state-of-the-art TT designs, each package includes a cost-effective combination of our products and services.
We provide further information about our popular SafeTTy Solutions packages on this page.
We also offer a SafeTTy Outsource™ service, through which we perform all of the software development activities for our customer.
[This page was last updated: 2024-05-03]
![]()
ReliabiliTTy® Technology Licences
Experienced development teams can consider purchase of our simplest SafeTTy Solutions ‘package’: a ReliabiliTTy Technology Licence (RTL).
In summary, RTLs allows use of techniques and TTRDs from the ERES2 book in commercial projects.
No additional code examples are provided. No support is provided.
For most SafeTTy customers, purchase of an additional RTL makes most sense for a second or third project, after working with a ReliabiliTTy software platform or ReliabiliTTy PCB / ECU – see below.
Please contact us for further information.
![]()
ReliabiliTTy® Software Platforms
ReliabiliTTy Software Platforms (RSPs) are designed to help your team to complete the software for their first ‘Time Triggered’ (TT) project, in compliance with one or more international safety standards (such as IEC 61508 or ISO 26262).
RSPs are customised to meet your requirements, but will typically include the following elements:
- a ReliabiliTTy code framework, customised to match your chosen hardware target;
- a certificate from exida®, demonstrating that your ReliabiliTTy framework is – for example – ‘SIL 3 Capable’;
- a ReliabiliTTy Technology Licence (RTL), allowing use of our technology in a single product or multiple products;
- consultancy support from Dr Michael J. Pont.
As an example, an RSP for a ‘SIL 3’ (IEC 61508) design, including a ReliabiliTTy code framework (with exida certificate), ReliabiliTTy Technology Licence (single product), 100 days of development time by one of our software teams and 10 days of consultancy support will have a total cost of approximately £160,000 plus VAT.
For most organisations, this is enough to provide a solid foundation for their first safety-critical embedded system.
Please contact us for further information.
![]()
![]()
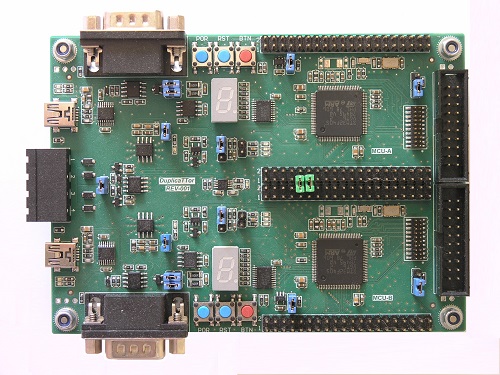
ReliabiliTTy® PCBs and ECUs
Working with ASRP-Systems, we can provide custom PCB designs or full custom ECU designs, each with a matching ReliabiliTTy software platform. These ReliabiliTTy PCBs and ECUs are designed to help your team to complete the software and hardware for their first ‘Time Triggered’ (TT) project, in compliance with one or more international safety standards (such as IEC 61508 or ISO 26262).
Please see our DuplicaTTor board for a simple example of the type of PCB design that we can support.
Please see our customer-projects page for examples of the type of ECU that we can support.
![]()
![]() Please contact us for further details.
Please contact us for further details.![]()
![]()
Fully customised packages
![]() This page provides examples of typical SafeTTy Solution packages.
This page provides examples of typical SafeTTy Solution packages.
Every project is different. We can provide fully customised packages on request (to match your precise requirements).
Please contact us for further details.
![]()
![]()
The small print
![]()
All prices quoted on this page are in UK Pounds.
Fees and charges may be subject to VAT, depending on your location.
Quoted fees for RSPs on this page will vary depending on the amount of time required to adapt our ReliabiliTTy code framework to match your chosen hardware target. Additional fees will apply if hardware design work is required. Additional fees will apply if you require our development teams to develop your application software. Additional fees will apply if you require a multi-product ReliabiliTTy licence.
All of our work will be carried out remotely.
This page simply summarises some of our available packages: a formal quotation will be provided.
![]()
![]()
Further information
![]()
Please contact us for further information about SafeTTy Solutions Packages.
![]()
![]()